-
"But still that voice nags away: "Is it a game?" The question, in the end, proves laughably redundant. Ask my daughter if she's playing a game and she'll look at you like you're an idiot (I get this look a lot) because of course she's playing a game. What else would you call it? The difference is, it's a game on her terms and, crucially, it's a game that takes place in her head, for the most part." As suspected, Happy Action Theatre sounds brilliant. More toys, please.
-
Parkin / Donlan / Porter / Stuart start a blog about sub-$15 downloadable games. This is going to be good.
-
"It’s a live-streaming 3D point-cloud, carried over a binary WebSocket. It responds to movement in the scene by panning the (virtual) camera, and you can also pan and zoom around with the mouse." More on the webgl depthcam.
-
Depth-camera (Kinect) output streamed to webgl over websockets. Gorgeous to watch, snappy to manipulate.
-
"Nine hours in, with no end to the fetching and photographing and fishing and flower-watering in sight, I suggested to one of my nieces, who was playing the game with me (the whole thing's drop-in co-op friendly), that maybe collecting three pepper pots to make Monstro the Whale sneeze was not so very different to collecting three sets of banners for the Toon Town election. It turns out that, from the perspective of a six-year-old, it's entirely different, and I clearly understand little about whales and even less about elections." A marvellous, marvellous piece of writing from Christian (again).
-
"Every once in a while a video comes along which requires no comment at all. This is That Video." G1 JOCKEY!!!
-
"His base is too good, and I don’t have the choke. He proceeds to take a more dominant position, scores points, and my body is burning from the effort. The choke he applies toward the end of the match is almost a formality, since I’m far too tired to do much more than hang on. Second place. Second place because I’m learning the triangle choke, not learning Jiu Jitsu. Chipp never wins tournaments." A fantastic piece of writing, about beat-em-ups and combat sports, and the mindset you get into as you play both. I'm not a combat sports man, but it nails some of the inside of your brain when you've played a lot of beat-em-ups, for sure.
-
"But to my eye, GIF is the most popular animation and short film format that's ever existed. It works on smartphones in millions of people's pockets, on giant displays in museums, in web browsers on a newspaper website. It finds liberation in constraints, in the same way that fewer characters in our tweets and texts freed us to communicate more liberally with one another. And it invites participation, in a medium that's both fun and accessible, as the pop music of moving images, giving us animations that are totally disposable and completely timeless."
-
"My wife and I talk about this. We talk about the protocol of the fertility clinic. We talk about her support group, and failure to produce. We talk about adoption, which is expensive and ambiguous. We talk about giving up on the process and living our lives without the ghosts of unconceived children (the most adorable ghosts there are). We talk, and talk, and wait." Powerful, sad, brave writing from Paul Ford. Sometimes, you wish things were nice for the good people in the world.
-
"I needed to get up to speed with doing recursive node structures so I coded up a project that would put a dot on the screen. When you tapped this dot, it would create a bunch of orbiting child-dots. These children could also be tapped, creating even more child nodes. This prototype took less than a day to create and I naively thought we would be done with the whole thing in a week, max. Silly me."
Marvellous, dense post from Robert on designing Planetary: lots of show-everything, material exploration, and plussing. What detail looks like.
-
"Years later, when recounting his conversations with Beckett (which he did often), André the Giant revealed that they rarely talked about anything besides cricket."
-
"In this scenario one sunny day you're working on low-level NoSQL projects at the Gootch or wherever, and you get an email from Facebook and you go for the interview and Zuckerberg is talking about scaling PHP and suddenly pauses, gets this look in his eye, pulls his hoodie over his head and says “You have sixty seconds. You should be running.” Because engineers, as we are often reminded, are the ultimate prey."
-
"A problem with the human mind – your human mind – is that it's a horrific kludge that will fail when you most need it not to. The Ugh Field failure mode is one of those really annoying failures. The idea is simple: if a person receives constant negative conditioning via unhappy thoughts whenever their mind goes into a certain zone of thought, they will begin to develop a psychological flinch mechanism around the thought. The "Unhappy Thing" – the source of negative thoughts – is typically some part of your model of the world that relates to bad things being likely to happen to you."
-
"Designers get handed a tool kit that has as many tools as a good swiss army knife, and the maps reflect these tools. Millions of people use them to make appointments across town, find restaurants, and drive home for the holidays.
But what if, instead of a swiss army knife, we used a box of crayons? Or charcoal and newsprint? Or play-doh? What would those maps look like? What could they tell us about the world?"
-
"One thing that I learned during the launch of the original Macintosh in 1984 was that the press usually oversimplifies everything, and it can't deal with the reality that there are many people playing critical roles on significant projects. A few people always get too much credit, while most people get too little, that's just the way it has always worked. But luckily, it's 2011 and I can use the service that I helped to create to clarify things." This is Good And Proper. (Also it's good management).
-
How ads used to be made. Some beautiful photographs here.
-
Useful notes on the modern way of deploying Rails applications with Bundler and Capistrano.
-
'"The expectation is slightly weird here, that you can do this stuff without killing yourself," added McNamara. "Well, you can't, whether it's in London or New York or wherever; you're competing against the best people in the world at what they do, and you just have to be prepared to do what you have to do to compete against those people."'
This is what McNamara considers responding to controversy. I'm furious that men like this are allowed to manage other human beings.
-
"This is an atlas, then, made by that other nature, seen through other eyes. But those eyes have been following me, unseen and without permission, and thus I consider provoking breach a necessary act." This is good.
-
"csvkit is a library of utilities for working with CSV, the king of tabular file formats." Ooh.
-
"Synapse is an app for Mac and Windows that allows you to easily use your Kinect to control Ableton Live, Quartz Composer, Max/MSP, and any other application that can receive OSC events. It sends joint positions and hit events via OSC, and also sends the depth image into Quartz Composer. In a way, this allows you to use your whole body as an instrument." Oooh. OSC into anything; really nice, dead simple, and exactly the sort of thing I've been considering poking.
-
This is lovely: Lucier translated to the physical from the sonic; making rooms from previous rooms.
-
"I wonder if the use of the calibration pose will fade to the point where it becomes retro, included only by nostalgic programmers who that want to create that old 11-bit flavor of early depth cameras in their apps. Will we eventually learn to accommodate ourselves to a world where we’re invisibly tracked and take it for granted. Will the pose fall away in favor of new metaphors and protocols that are native to the new interface world slowly coming into existence?"
-
"I’m excited to announce that I’ve been contracted by O’Reilly to write a book about the Microsoft Kinect. The book is tentatively titled Making Things See: Computer Vision with the Microsoft Kinect, Processing, and Arduino. My goal is to introduce users to working with the Kinect’s depth camera and skeleton tracking abilities in their own projects and also to put those abilities in the wider context of the fields of gestural interfaces, 3D scanning, computer animation, and robotics." Nice. Joining this stuff together is *hard*, and getting it into the hands of designers, rather than programmers, is very important.
Waving at the Machines
21 May 2011
There was a line in this blogpost about what it’s like to QA Kinect games that really caught my eye.
The cameras themselves are also fidgety little bastards. You need enough room for them to work, and if another person walks in front of it, the camera could stop tracking the player. We had to move to a large, specially-built office with lots of open space to accommodate for the cameras, and these days I find myself unconsciously walking behind rather than in front of people so as not to obstruct some invisible field of view.
(my emphasis).
It sounds strange when you first read it: behavioural change to accommodate the invisible gaze of the machines, just in case there’s an invisible depth-camera you’re obstructing. And at the same time: the literacy to understand that there when a screen is in front of a person, there might also be an optical relationship connecting the two – and to break it would be rude.
The Sensor-Vernacular isn’t, I don’t think, just about the aesthetic of the “robot-readable world“; it’s also about the behaviours it inspires and leads to.
How does a robot-readable world change human behaviour?
It makes us dance around people, in case they’re engaged in a relationship with a depth-camera, for starters.
Look at all the other gestures and outwards statements that the sensor-vernacular has already lead to: numberplates in daft (and illegal) faces to confuse speed cameras; the growing understanding of RFID in the way we touch in and out of Oyster readers – wallets wafted above, handbags delicately dropped onto the reader; the politely averted gaze whilst we “check in” to the bar we’re in.
Where next for such behavioural shifts? How long before, rather than waving, or shaking hands, we greet each other with a calibration pose:
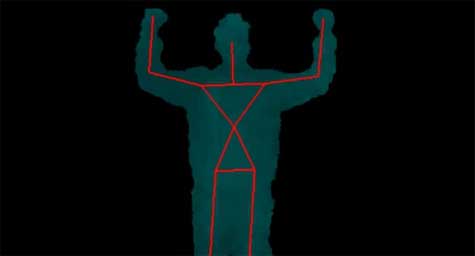
Which may sound absurd, but consider a business meeting of the future:
I go to your office to meet you. I enter the boardroom, great you with the T-shaped pose: as well as saying hello to you, I’m saying hello to the various depth-cameras on the ceiling that’ll track me in 3D space. That lets me control my Powerpoint 2014 presentation on your computer/projector with motion and gesture controls. It probably also lets one of your corporate psychologists watch my body language as we discuss deals, watching for nerves, tension. It might also take a 3D recording of me to play back to colleagues unable to make the meeting. Your calibration pose isn’t strictly necessary for the machine – you’ve probably identified yourself to it before I arrive – so it just serves as formal politeness for me.
Why shouldn’t we wave at the machines? Some of the machines we’ll be waving at won’t really be machines – that telepresence robot may be mechanical, but it represents a colleague, a friend, a lover overseas. Of course you’d wave at it, smile at it, pat it as you leave the room.
If the robot-read world becomes part of the vernacular, then it’s going to affect behaviours and norms, as well as more visual components of aesthetics. That single line in the Kinect QA tester’s blogpost made me realise: it’s already arriving.
-
"This is all very preliminary, but here is a first pass as a Processing Kinect library." Ooh.
-
Trap streets – yes, of course. But trap rooms; trap architectures? That's iiinteresting.
-
"Bookland is a fictitious country created in the 1980s in order to reserve a Unique Country Code (UCC) prefix for EAN identifiers of published books, regardless of country of origin, so that the EAN space can catalog books by ISBN rather than maintaining a redundant parallel numbering system." Awesome. Via Kim (who else?)
-
"This tutorial assumes no previous knowledge of scripting or programming, but progresses rapidly toward an intermediate/advanced level of instruction . . . all the while sneaking in little nuggets of UNIX® wisdom and lore. It serves as a textbook, a manual for self-study, and a reference and source of knowledge on shell scripting techniques. The exercises and heavily-commented examples invite active reader participation, under the premise that the only way to really learn scripting is to write scripts." Really good stuff, which Nick pointed me at this morning when I revealed I couldn't write bash scripts.